گیربکس ها اغلب برای کنترل حرکت و به منظور تغییر گشتاور و سرعت خروجی از موتور به قطعهی متحرک به کار میروند. اگر از یک چرخدنده کوچکتر با دندانههای کمتر (که اغلب با عنوان پینیون -pinion- از آن یاد میشود) برای چرخاندن چرخندهای بزرگتر با دندانههای بیشتر استفاده شود، گشتاور انتقال یافته به بار افزایش مییابد و سرعت دورانی بار کاهش خواهد یافت.
در گیربکسهایی که دارای چرخدندههای ساده، هلیکال یا مخروطی (bevel) هستند، نسبت چرخدنده – یعنی میزان افزایش گشتاور و کاهش سرعت – به سادگی عبارتست از نسبت تعداد دندانههای روی چرخدنده حرکت داده شده (چرخدنده ی بزرگتر) به تعداد دندانه های چرخدنده راه انداز (چرخدنده کوچک تر یا پینیون).
از لحاظ نظری، نسبت چرخدنده را در هر شرایطی میتوان با تنظیم تعداد دندانههای روی چرخندههای راهانداز و حرکت داده شده مشخص کرد، اما در کاربردهای واقعی، فراهم کردن مقادیر بزرگ نسبت چرخدنده با چالشهای طراحی – مانند نیاز به پینیون (چرخدنده راه انداز) بسیار کوچک، تنشهای بزرگ در دندانههای چرخدنده و قابلیت محدود در انتقال گشتاور – مواجه است. خوشبختانه، با استفاده از گیربکس چند مرحلهای، این چالشها به راحتی برای طراحان ماشین آلات قابل حل است.
با این مطلب از بلاگ سام تجهیز، همراه باشید.
محاسبه نسبت گیربکس چند مرحله ای
محاسبه نسبت چرخدنده در یک گیربکس خورشیدی تک مرحلهای بستگی به این دارد که کدام چرخدندهها راهانداز و ثابت محسوب میشوند و کدام جزو قطعات خروجی هستند. در اکثر گیربکسهای خورشیدی مورد استفاده در کنترل حرکت، چرخدنده خورشیدی چرخدندهی راه انداز است، چرخدندهی حلقوی ثابت است و حامل شفت خروجی را میچرخاند. در این پیکربندی نسبت چرخدنده (ip) برابر است با یک به علاوهی نسبت دندانههای چرخدندهی حلقوی (Zr) به دندانههای چرخدندهی خورشیدی (Zs)، یا به عبارت دیگر ip = 1 + Zr/Zs .
گیربکس چند مرحله ای از دو یا چند جفت یا مرحله از چرخدندهها، که در آن خروجی یک مرحله به ورودی مرحله بعد متصل میباشد، تشکیل شده است. نسبت چرخدندهای حاصل شده برابر است با حاصلضرب نسبتهای چرخدندهای مراحل. به عنوان مثال، در یک گیربکس دو مرحلهای که نسبت چرخدندهای یک مرحله از آن 5:1 و نسبت چرخدندهای مرحله دوم آن 3:1 است، نسبت چرخدندهای خروجی 15:1 (3×5) میباشد، بنابراین گشتاور تحویل شده به بار – بدون در نظر گرفتن افت های انتقال – 15 برابر بیشتر از گشتاور تولید شده توسط موتور و سرعت تحویل شده به بار یک پانزدهم سرعت موتور است.
گیربکس خورشیدی چند مرحله ای
برخلاف گیربکس های چند مرحله ای که متشکل از چرخدندههای موازی هستند، گیربکس خورشیدی چند مرحله ای که در ویدئو زیر نشان داده شده، از مراحلی تشکیل شده است که به صورت هم مرکز به هم متصل هستند و به این ترتیب، هنگامی که به مقادیر بالای نسبت کاهش نیاز باشد، اثرگذاری بیشتری نسبت به طرحهای موازی دارد.
گیربکس های چند مرحله ای ممکن است متشکل از انواع مختلفی از چرخدندهها در هر مرحله باشد – که اغلب هم همینطور است. به عنوان مثال، گیربکس خورشیدی قائم را میتوان از یک مرحلهی خورشیدی و یک مرحلهی اسپیرال-مخروطی (bevel) ساخت. و همانطور که در مثال بالا نشان داده شد، مقدار کاهش در هر مرحله میتواند متفاوت باشد، اما گیربکس های چند مرحله ای معمولاً با نسبت چرخدندهای بالا در ورودی و نسبت کمتر در خروجی طراحی میشوند.
در وبلاگ سام تجهیز بیشتر بخوانید: انتخاب صحیح گیربکس صنعتی
بازده گیربکس های چند مرحله ای
بازده کل یک گیربکس چند مرحله ای (یا تخمین مناسبی از آن) را میتوان با ضرب کردن بازدههای مراحل بدست آورد. و اشاره به این نکته مهم است که در هر مرحله، جهت چرخش بین ورودی و خروجی معکوس میشود، به جز در مرحلهی خورشیدی که در آن جهت چرخش بین ورودی و خروجی به همان شکل حفظ میگردد.
در اکثر گیربکس های تک مرحله ای، جهت چرخش شفتهای ورودی و خروجی عکس هم است، در حالی که در گیربکس های دو مرحله ای، طبق آنچه که در شکل زیر نشان داده شده است، تغییر اضافی در چرخش توسط مرحله دوم سبب میشود چرخش شفت خروجی هم جهت با چرخش شفت ورودی باشد.
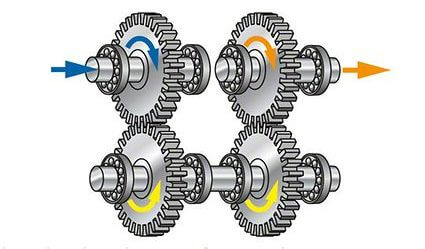
در اکثر گیربکس های تک مرحله ای، شفت خروجی در جهتی مخالف با شفت ورودی میچرخد. اما با هر مرحلهی اضافی، جهت چرخش مجدداً معکوس میشود. بنابراین، در چیدمان چرخدنده ای دو مرحلهای که در اینجا نشان داده شده است، خروجی در همان جهت ورودی میچرخد.
در این مقاله motion control tips بیان شده با وجود اینکه بازده تا حدی کاهش مییابد، گیربکس های چند مرحله ای نسبتهای چرخدندهای بیشتری را، در مقایسه با آنچه که با طرحهای چرخدندهای یک مرحلهای میتوان به آن دست یافت، حاصل میکنند. و این کار را در فضای کوچکی که قابلیت بهینه شدن برای دستیابی به بهترین ترکیب از توانایی انتقال گشتاور، اینرسی پائین و بازده بالا را دارد انجام میدهد.
چرخدنده های حلزونی، بدون اینکه به اندازه چرخدنده های قطاری پیچیدگی داشته باشند، نسبت های بسیار بالایی در یک مرحله دارند – تا 60:1 یا بیشتر در برخی موارد – اگرچه بازده آن ها نسبت به طرح های چند مرحله ای کمتر است.
برای استعلام قیمت گیربکس صنعتی و خرید انواع موتورگیربکس با سام تجهیز، در ارتباط باشید.



